Working Principles
Sockets
We connected to Pluto first by connecting our device to the drone’s hotspot, then we used TCP sockets to connect
to the drone using IPV4 scheme and socket library in python to do the same. The server iss hosted at 192.168.4.1:23
We sent the MSP Packet data encoded as bytes to pluto using sockets, the details about the packet is explained below.
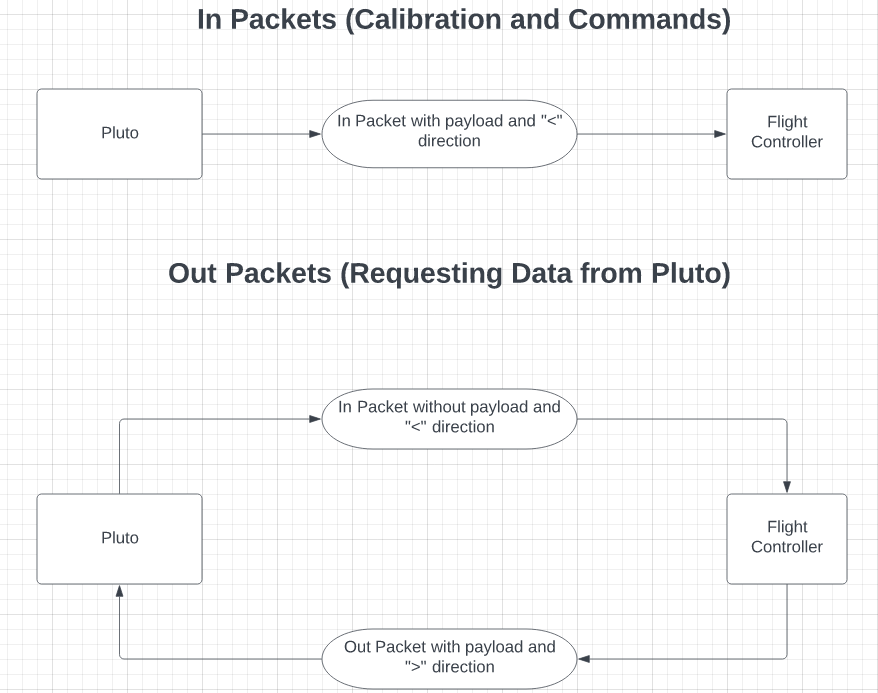
MSP Packets
We used MSP Packet scheme to communicate with Pluto, ie send commands, request data and calibrate the drone. The data of the packet was first encoded into bytes and then sent as a byte stream (array of bytes) to the drone. The basic structure of the packet has been explained below.
Structure of the Packet
Header |
Direction |
Message Length |
Type of Payload |
Message Data |
Checksum |
|---|---|---|---|---|---|
2 Bytes |
1 Byte |
1 Byte |
1 Byte |
N Bytes |
1 Byte |
Details of the Packet
Type of Byte |
ASCII |
Hexadecimal |
|---|---|---|
Header |
$M |
0x24 0x4d |
Direction |
‘<’ or ‘>’ |
0x3c (to the drone) or 0x3e (from the drone) |
Message Length |
0x00 - 0xff |
|
Type of Payload |
0x01 - 0xff |
|
Payload |
Message Body encoded into N bytes |
|
Checksum |
XOR of Bytes of “Msg length”, “Command” and all bytes of “Payload” |